





基于超声波传感器的自主移动机器人的探测系统
2 一体式超声波传感器与步进电机组成的探测系统
2.1 结构设计
实物照片如图1所示,超声波传感器焊在PCB板上,板子通过钢管树起,钢管另一端和步进电机轴相连,步进电机固定在机器人底盘下方。传感器控制信号与输出信号通过信号线和车身上的控制板相连。另外在超声波传感器的探头前加一泡沫材料制成的圆台形套筒,上口直径为22 mm,下口直径为16 mm,高20 mm。这样发射波的波束角以及反射波被接收的角度都大大受限制。为了机器人自我调整姿态,需要确定其自身的转动方向和基准位置。因而自制一片由直射式红外光电传感器和转盘组成的简易光电编码器。2个直射式红外光电传感器分布如图2中2个I,Ⅱ所示以180°间隔水平安置在机器人小车车身两侧边的中点连接线上。转盘与转臂连接在同心圆上,如图中外圆所示,1,3刻线间相隔27°;2,1刻线相隔180°,其中1刻线与超声波传感器的中心保持在同一水平线上。I单独导通作为基准坐标,I,Ⅱ同时导通用来判断旋转方向,Ⅱ单通作为机器人沿墙回归时的导航基准。
通过步进电机带动一体式超声波传感器转动,以传感器中轴垂直于机器人车体的方向作为其自身姿态调整的坐标基准,步进电机采用4相4拍步距角为1.8°,每转1步,超声波传感器检测1次,将测量值通过串口送上位机。
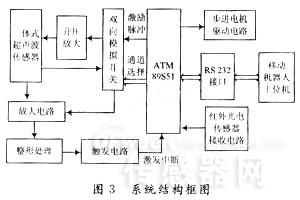
2.2 探测系统硬件设计
探测系统硬件主要由超声波发生电路、超声波接收电路,步进电机调速模块等组成。如图3所示,系统的核心为单片机89S51,主要完成信号的发射和接收、控制步进电机、并传送数据给机器人上位机进行处理。
超声波的发射电路采用单片机ATM89S51的P11口输出发射脉冲,由74HC04作为驱动来连接超声波传感器,74HC04是为了增强其输出电流的能力,提高超声波传感器的发射距离。

 分享
分享
图片新闻








最新活动更多
-
即日-4.30立即下载>>> 【限时下载】《2025激光行业应用创新发展蓝皮书》
-
即日-5.20立即下载>> 【限时免费】物理场仿真助力生物医学领域技术创新
-
5月30日立即报名>> 2026激光行业应用创新发展蓝皮书火热招编中!
-
即日-5.31立即申报>>> 维科杯·OFweek 2026光学行业年度评选
-
5月31日立即申报>>> 维科杯•OFweek 2026激光行业年度评选
-
7月15-16日报名参会>>> OFweek 2026中国激光产业高质量发展峰会







发表评论
登录
手机
验证码
手机/邮箱/用户名
密码
立即登录即可访问所有OFweek服务
还不是会员?免费注册
忘记密码其他方式
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论