





基于超声波传感器的自主移动机器人的探测系统
超声波接收处理电路采用集成电路CX20106。CX20106为红外接收专用集成电路,在此利用CX20106作为超声波传感器接收信号的放大检波装置,亦取得良好的效果。CX20106中前置放大器接收到超声波接收探头的反射信号后,对信号进行放大,电压增益约80 dB。然后将信号送到限幅放大器,使其变为矩形脉冲,再由滤波器进行频率选择,滤除干扰信号,由检波器滤掉载频检出指令信号,再经过整形后,由7脚输出低电平。7脚输出的脉冲下降沿通过单片机INT0口输入。如图4所示。
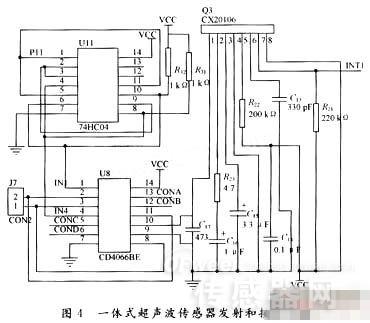
一体式超声波传感器发射电路与接收电路都用相同的传感器引脚输入/输出,如不将输入/输出隔离开,接收电路与发射电路会相巨影响,采用CMOS双向模拟开关CD4066BE实现发射与接收的隔离。步进电机控制模块,采用环形脉冲分配器L297+双H桥功率集成电路L298的控制方式。单片机的P1.6,P1.7,P2.3分别接L297的CW,clock,enable控制端,控制电机的正反转、时钟信号、启停。
2.3 探测系统软件设计
探测系统的软件主要由主程序模块、中断服务程序模块、传感器发射接收模块组成。这里主要对探测系统主程序模块加以说明。主程序流程图如图5所示。
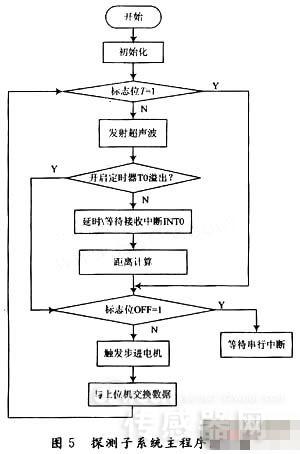
超声波传感器和步进电机测控模块分属不同的单片机控制,因此感测系统与移动机器人的上位机必须依靠单片机间的I/O口线及串行异步通讯实现。标志位T是用来切换动作,T=0,OFF=0同时满足时,是超声波传感器寻常的探测过程;T=1,OFF=0时是每一个循环测量前调整方位角用;OFF=1是等待下一次动作。计算回波的时间采用定时器T0,因此距离值d=0.334×(TH0×256+TL0)/2。每测完1次,给步进电机1个触发脉冲。然后判断下一个动作,是做传感器探测还是机器人自身方位角调整,这样又进入一个新的循环。

 分享
分享
图片新闻








最新活动更多
-
即日-4.30立即下载>>> 【限时下载】《2025激光行业应用创新发展蓝皮书》
-
即日-5.20立即下载>> 【限时免费】物理场仿真助力生物医学领域技术创新
-
5月30日立即报名>> 2026激光行业应用创新发展蓝皮书火热招编中!
-
即日-5.31立即申报>>> 维科杯·OFweek 2026光学行业年度评选
-
5月31日立即申报>>> 维科杯•OFweek 2026激光行业年度评选
-
7月15-16日报名参会>>> OFweek 2026中国激光产业高质量发展峰会







发表评论
登录
手机
验证码
手机/邮箱/用户名
密码
立即登录即可访问所有OFweek服务
还不是会员?免费注册
忘记密码其他方式
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论